Information for the
extended abstract for AMAM2023
Gait Transition and Adaptation Using the
Spinal Cat Model
K. Kodono and H. Kimura
Introduction
It has been generally accepted that adaptive motion of
animals emerges through the interaction among the central neural system,
the body and environment. We intend to understand mechanisms in the
emergence of adaptive motion at the level of sensor-motor functions by
the constructive approach. Since we are interested in how the spinal
cord of cats utilizes their body natural dynamics, we propose the spinal
cat model and simulate the gait generation, transition and adaptation.
Reference
Kodono, K., Kimura, H.: Gait transition and adaptation
using the spinal cat model. In Proc. of Int. Symp. on Adaptive Motion of
Animals and Machines, Kobe, Jun. 2023, pp.85-86
- Hindlimbs locomotion of a spinal cat
on the treadmill
- Gait transition from walk to run & simultaneously from
out-of-phase to in-phase movie
(.mp4)
- S. Grillner: ``Spinal Cat Movie (1980),'' The basal ganglia and
brainstem locomotor control, E. Garcia-Rill eds., 1989.
- H. Forssberg, S. Grillner, J. Halbertsma and S. Rossignol: ``The
locomotion of the low spinal cat. II. Interlimb coordination,'' Acta
Physiol. Scand., vol.108, pp.283--295, 1980.
[doi:10.1111/j.1748-1716.1980.tb06534.x]
- Simulation of Hindlimbs
locomotion of a spinal cat on the treadmill
- The walk to run (out-of-phase) gait
transition movie(real)
(.mp4), movie(slow)
(.mp4)
- The walk to run (in phase) gait
transition movie(real)
(.mp4), movie(slow)
(.mp4)
- At the beginning, the belt speed : 0.14(m/s). Afterwards, the belt
speed increased to 0.3(m/s) for out-of-phase and 0.42(m/s) for
in-phase.
- In each simulation, all parameters were constant since this is the
study of the autonomous.
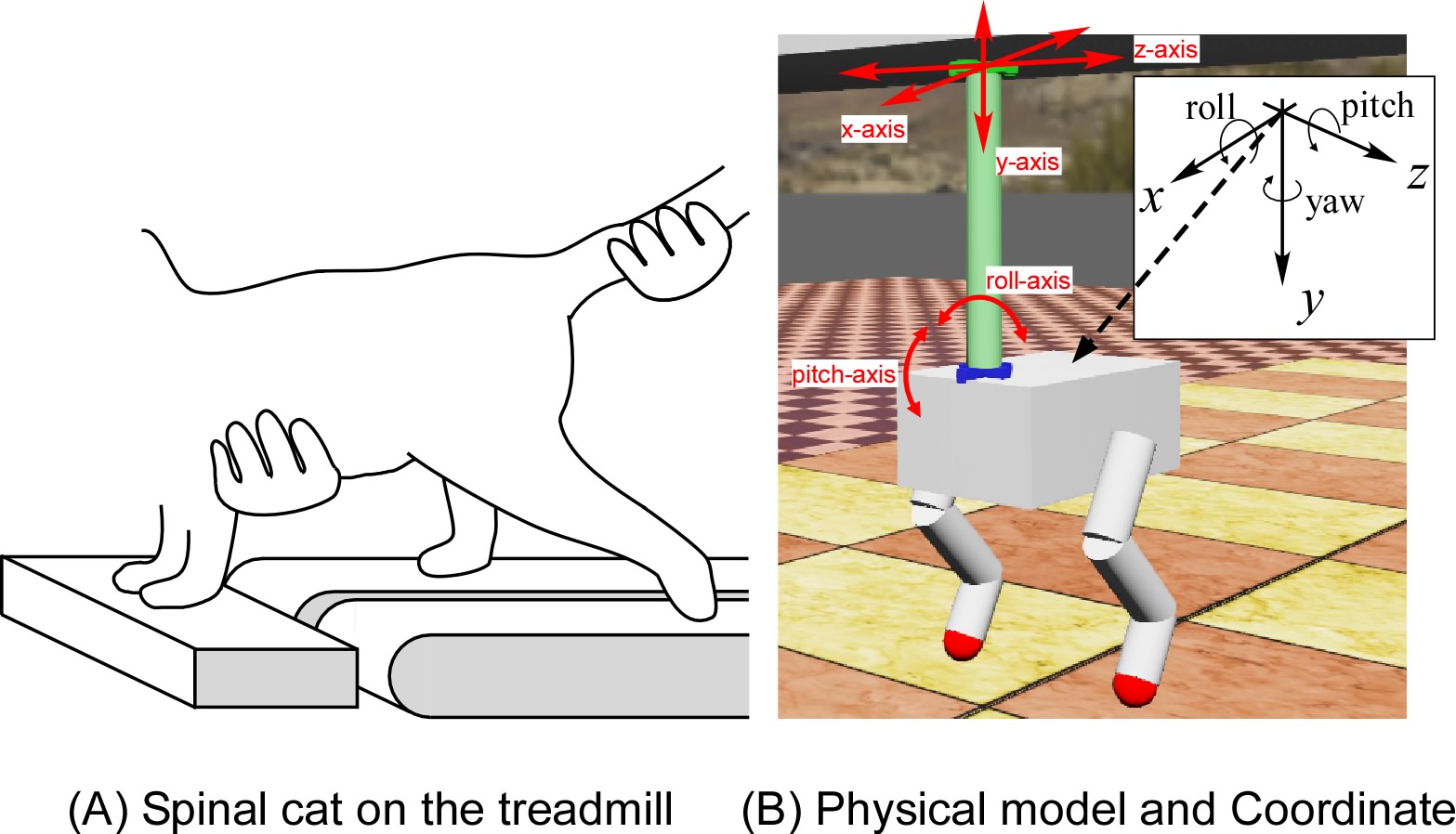
- In the fixture (see the Fig.2-(B) below), z-axis (left-right),
rolling and pitching motion were free. The x-axis (fore-hind) and the
y-axis (up-down) were constrained by the spring-damper. The yaw motion
was fixed. We referred to the constraint in the spinal cat on the
treadmill (see the Fig.2-(A) below).
- Hindlimbs locomotion of a spinal cat
on the split-belt treadmill
- A. Frigon, et al.: ``Left-right coordination from simple to extreme
conditions during split-belt locomotion in the chronic spinal adult
cat,'' J. Physiol., vol.595, no.1, pp.341--361, 2017.
- movie
(.mp4)
- Simulation of Hindlimbs
locomotion of a spinal cat on the split-belt treadmill
- double steps movie
(.mp4)
- transition from single step to double steps
movie (.mp4)
- Experiment of Hindlimbs
locomotion of Kotetsu on the split-belt treadmill
- double steps movie
(.mp4)
Figures not included in the abstract
Fig.2 Locomotion on the treadmill with
being fixed.
In (B), each leg
has the hip, knee and ankle joints in the pitch plane, and the fixture has
joints in the direction of the red arrows.
Fig.3 Simulation of the autonomous walk-run
gait transition. The tied-belt treadmill speed was changed from 15 to 30
[cm/s] at 7 [s].
The `blue' and
`red' colors of lines and marks mean LH and RH, respectively.
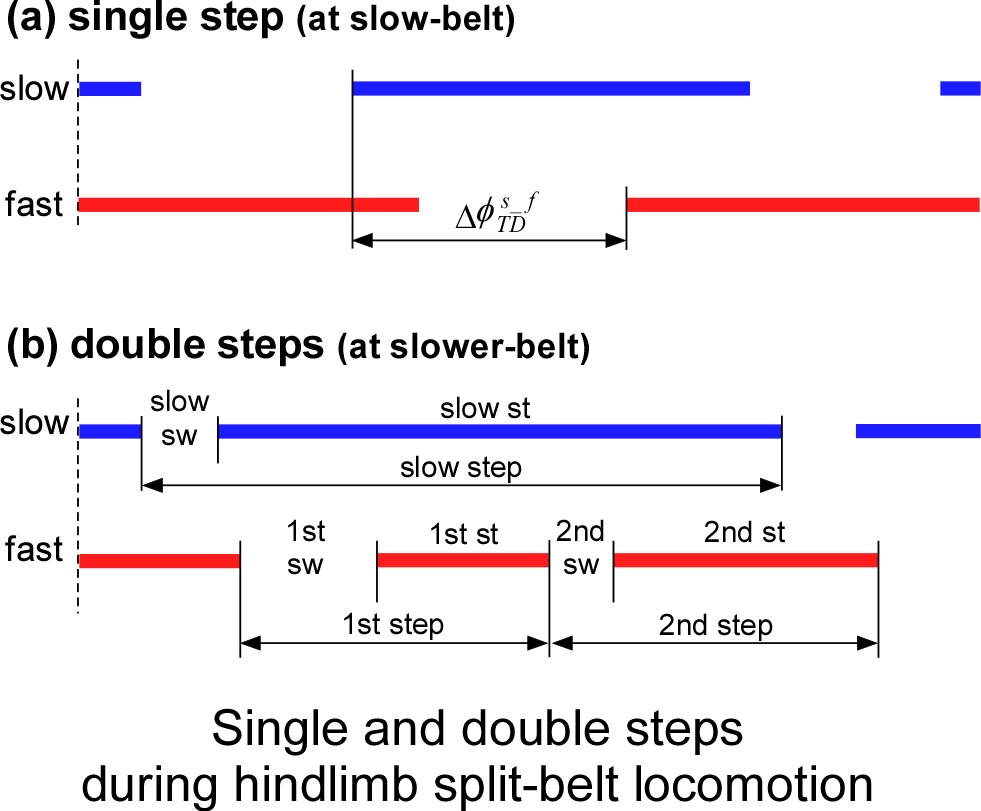
Fig.4 The gait diagram of split-belt
locomotion. (a) 1:1 (single) and (b) 1:2 (double) mean the number of steps
of the fast-leg for the single step of the slow-leg.
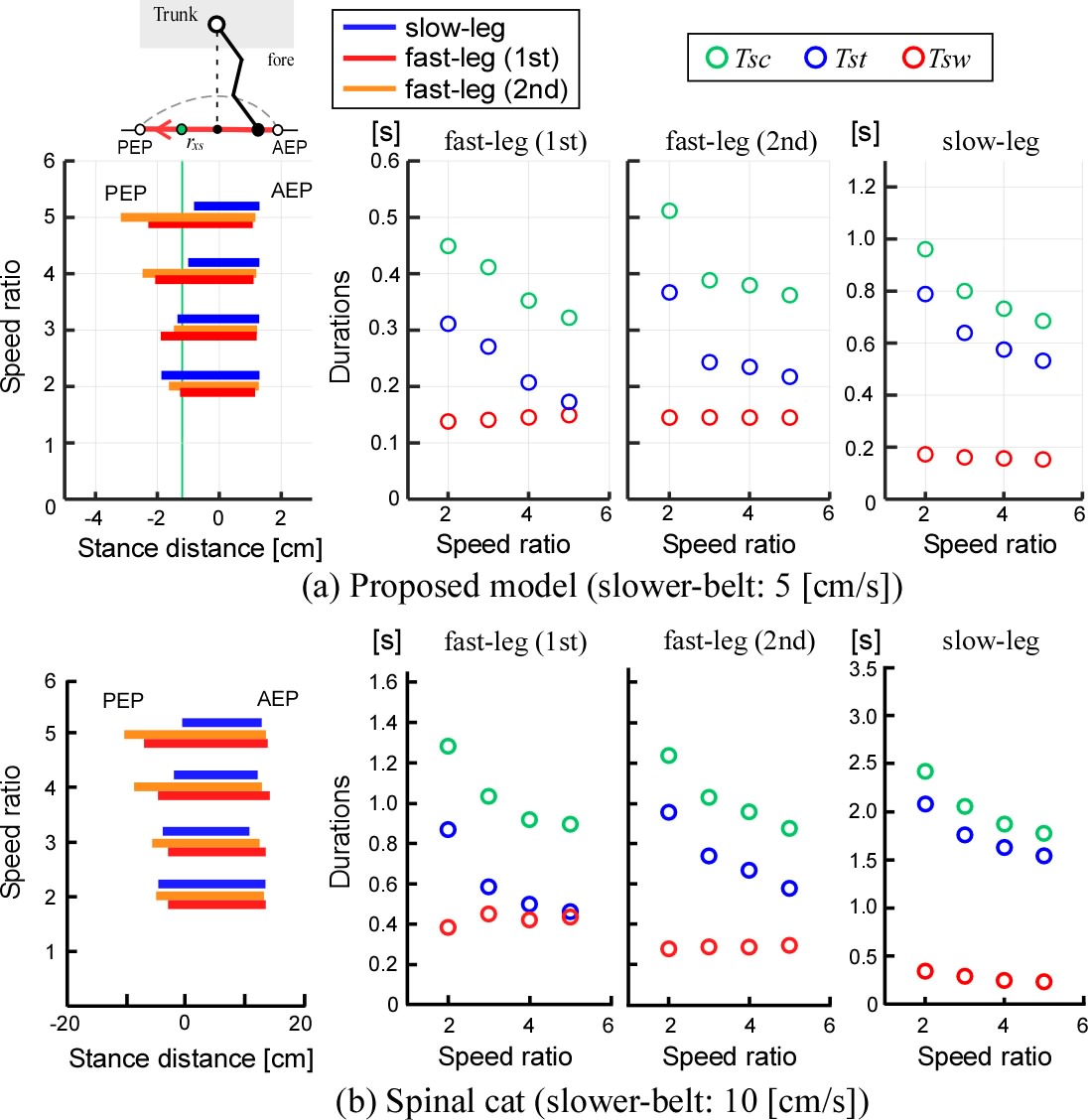
Fig.5 Comparison of double steps in (a)
proposed model and (b) spinal cats\cite{Frigon2017} during hindlimbs
split-belt locomotion.