We would like to construct the control model of human walking using a bied robot. Especially, we are trying to construct the model of splitbelt* treadmill walking of the normal and the cerebellar disease subjects.
*In tied and splitbelt configurations, the speed of left and right belts is same and different, respectively.
There are huge numbers of studies that measured kinematics, dynamics and the oxygen uptake and so on in human walking on the treadmill. Especially in the splitbelt treadmill walking, a remarkable difference is seen between normal and cerebellar disease subjects in kinematics[1], [2]. If we succeed in construction of the control model of the disease subject walking, we can expect applications to rehabilitation, development of walking assist devices and so on.
A biped robot called `Tetsuro' was developed to construct the control model of human walking and investigate how it works. The efficient and robust 2D walking on the tied treadmill was achieved by PD control, the cyclic motion trajectory based on the inverted pendulum, and by the forward speed and posture control depending on the stepping reflex. The gait adaptations in splitbelt treadmill walking was achieved by P-gain adjustment at hip joint of the stance leg. This meant that the robot adapted its motion to environment by changing the property of its body using its internal sensor information. The indexes representing kinematics features obtained in robot experiments had much similarities to those obtained in human (normal subject) experiments. Here are results of experiments of the robot and human : "stride length", "duty ratio" and "difference of step length", "differece of RDLSP (ratio of double legs stance period)".
While seeing results of human (normal subject) experiments of splitbelt walking, Reisman et al.[1] and Morton et al.[2] mentioned that there are two different types of adaptations behind human splitbelt treadmill walking, and called the first one (stride length and duty ratio) “reactive adaptations”and the second one (difference of step length and difference of double legs stance period) “predictive adaptations.” In contrast to conclusions of such studies on human splitbelt walking, we showed that the single reactive adaptation mechanism is enough to generate two types of indexes. We also showed that P-gain at hip joint of the stance leg is the control parameter of gait adaptations in splitbelt walking. Consequently, we successfully constructed the model of human splitbelt walking using a biped robot.
[1] Reisman, D.S., Block, H.J. and Bastian, A.J. Interlimb Coordination During Locomotion: What Can be Adapted and Stored?, J. of Neurophysiology 94:2403-2415 (2005).
[2] Morton, S.M. and Bastian, A.J. Cerebellar Contributions to Locomotor Adaptations during Splitbelt Treadmill Walking, J. of Neuroscience 26:9107-9116 (2006).
walking with a trunk, 3D walking with rolling (lateral) motion, model of the cerebellar disease subject walking
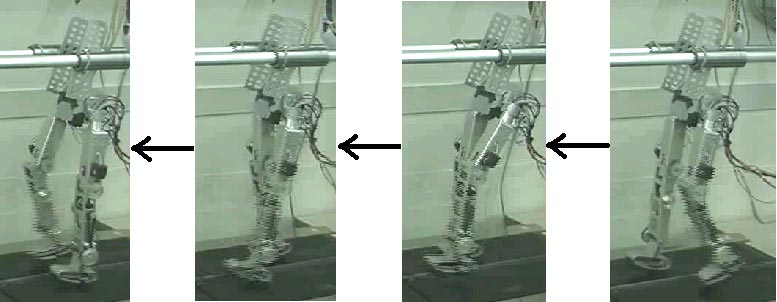
tied treadmill walking of Tetsuro. Rolling motion of Tetsuro is constrained by two parallel pipes at its body. Since friction at contacting points between the constrained plates of the body (Figure 1-(a)) and two linear bushings of the pipes is small, the body has three DOF in the pitch plane and can move smoothly. Therefore, Tetsuro could fall down at the worst case. The center of gravity of the body is slightly below the hip joint. The controller and the energy source are not mounted on the robot, and the robot is tethered. But the influence of wires is very small.
autonomous gait adaptation on the splitbelt treadmill(Mar. 2008) : the speed of the right belt becomes 1.5 times high at 20 s after the start of walking