人のトレッドミル(ベルトコンベアーの一種)上での歩行制御モデルや歩行障害モデルを二脚ロボットを用いて構築する.
人の歩行の運動学,動力学,酸素吸収量を調べるためにトレッドミル上での歩行実験が数多く行われている.特に,左右のベルトの速度が異なるsplitbelt条件での歩行パターンの適応を調べると,健常者と小脳疾患者では運動学的パターンに大きな相違が現れる[1], [2].人の歩行障害モデルを作ることができれば,リハビリや歩行介助装置への応用が期待できる.
現在は健常者の歩行制御モデルを構築中である.関節でのPD制御,倒立振子モデルによる支持脚と遊脚の軌道計画,遊脚ヒザ関節のfreeな運動,支持脚ヒザ関節のlock,遊脚着地角制御(踏み出し反射)により,左右のベルトの速度が同じtied条件での効率的で外乱に対してロバストな2D歩行が実現されている.さらに,支持脚腰関節のPゲインの自動調節を導入し,splitbelt条件での自律的な適応歩行を実現した.ロボットと人での実験結果の比較のために運動学的な指標として,「ストライド」や「ディーティ比」,「歩幅の左右脚間の差」や「両脚支持期間比(RDLSP: ratio of double legs stance period)の左右脚間の差」を取り上げ,非常に近いパターンが得られた.
人の歩行実験の結果からReismanら[1]やMortonら[1]は"reactive adaptation"と"predictive adaptation"という二種類の異なる調節メカニズムが人には存在することを示唆している.我々は二脚ロボットを用いた実験により踏み出し反射を前提とした上で"reactive adaptation"という一種類のメカニズムにより人と同様の結果が得られることを示すことができた.さらに,splitbelt条件での適応において支持脚腰関節のPゲインがコントロールパラメータであることを示すことができた.
[1] Reisman, D.S., Block, H.J. and Bastian, A.J. Interlimb Coordination During Locomotion: What Can be Adapted and Stored?, J. of Neurophysiology 94:2403-2415 (2005).
[2] Morton, S.M. and Bastian, A.J. Cerebellar Contributions to Locomotor Adaptations during Splitbelt Treadmill Walking, J. of Neuroscience 26:9107-9116 (2006).
上体を付ける.ロール運動も可能とする.小脳疾患のモデルを作る.
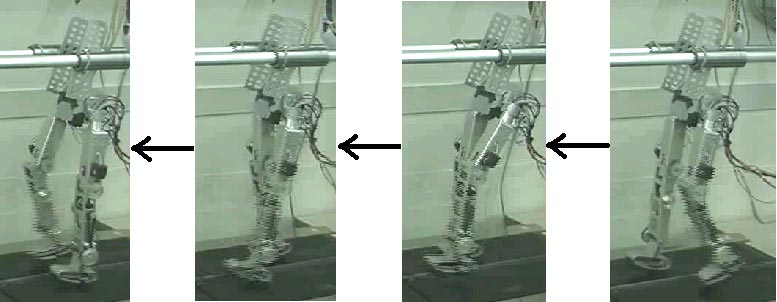
左右のベルトの速度が同じtied条件でトレッドミル上を歩行の2D二脚ロボット:”鉄郎”.ロボットのロール(lateral)運動は二本の棒に取り付けられたリニアブッシュにより拘束されており,ピッチ(sagital)面内の二次元歩行である.ただし,胴体の前後・上下・ピッチ軸まわりの回転運動は拘束されていないので,制御が悪ければロボットは最悪転倒する.鉄郎の胴体の重心は腰関節よりも下にあるため上体(トランク)無しのモデルである.制御装置や電源はロボット外にありケーブルでつながっているが,歩行中のケーブルの影響は小さい.
splitbelt treadmill上の自律適応歩行(2008年3月):途中で右のベルトの速度が1.5倍になる
[学術雑誌論文]
- [Tetsuro] Y. Otoda, Hiroshi Kimura and Kunikatsu Takase, "Construction of gait adaptation model in human splitbelt treadmill walking", Applied Bionics and Biomechanics, Vol.6, No.3, pp.269-284, 2009.11. (PDF)
- [Tetsuro] Y. Otoda, Hiroshi Kimura and Kunikatsu Takase, Gait Adaptation Model in Human Split-Belt Treadmill Walking Using a Two-Dimensional Biped Robot, Advanced Robotics, Vol.23, No.5, pp.535-561, 2009 (PDF, online journal)
[ワークショップ:招待講演]
- Hiroshi Kimura, Robotics as a Tool for Gait AND Posture Study, Proc. of Int. Symp. on Adaptive Motion of Animals and Machines (AMAM2008), Cleveland, 2008.06 (extended abstract)
[国際会議(査読あり):一般講演]
- 2009 [Tetsuro]
- Y. Otoda and Hiroshi Kimura, Gait Adaptation Model in Human Splitbelt Treadmill Walking, Proc. of Dynamic Walking 2009, Vancouver, 2009.06 (Abstract)
- 2008 [Tetsuro]
- Y. Otoda, Hiroshi Kimura and Kunikatsu Takase, Adaptive Walking of a 2D Biped Robot during Splitbelt Treadmill, Proc. of SICE Annual Conference (SICE2008), Tokyo, pp.2507-2512, 2008.08 (PDF)
- 2007 [Tetsuro]
- Y. Otoda, Hiroshi Kimura and Kunikatsu Takase, Efficient Bipedal Walking Using Delayed Stepping Reflex, Proc. of SICE Annual Conference (SICE2007), Takamatsu, pp.2170-2174, 2007.9
- Y. Otoda and Hiroshi Kimura : Bipedal Walking Using Natural Dynamics and Delayed Stepping Reflex, Proceedings of the 2nd International Symposium on Mobiligence, Awaji, Japan, pp. 121-124 2007.07
ACKNOWLEDGEMENTS
This work has been partially supported by a Grant-in-Aid for Scientific Research on Priority Areas ”Emergence of Adaptive Motor Function through Interaction among Body, Brain and Environment” from the Japanese Ministry of Education, Culture, Sports, Science and Technology.