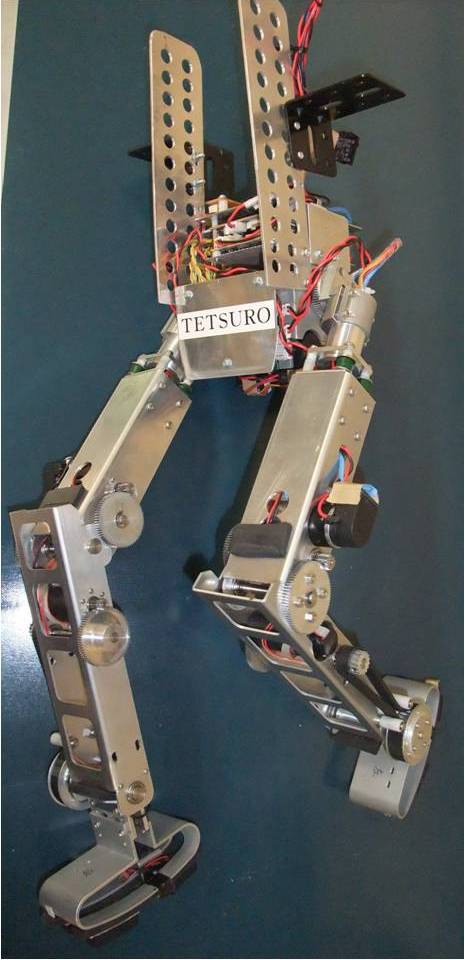
 a biped robot: "Tetsuro" (currently, it has a trunk controlled by DC motor on the waist)
a biped robot: "Tetsuro" (currently, it has a trunk controlled by DC motor on the waist)Human can select the landing point of a swinging leg based on visual information while keeping the posture be stable in the limit-cycle based walking. We are studying on the control method to make a 2D biped robot Tetsuro land its swinging legs on marks in treadmill walking while keeping its posture be stable. Tetsuro uses the touchdown angle control [1,2,3] to keep the limit-cycle. But in the case that the landing point is specified by the mark on the treadmill, Tetsuro can not determine the tochdown angle freely, and it means that landing a swinging leg on the specified mark makes the posture controlled by touchdown angle control be unstable. How to stabilize the posture under the touchdown angle control disturbed by the landing point control based on vision is the main subject of this study.
The marks moving on the treadmill can be recognized and tracked using the single IEEE1394 digital camera. At this moment, this camera is mounted on the fixed frame over the robot, and not mounted on Tetsuro to avoid the pitching motion problem of the camera mounted on the trunk.
[1] Miura & Shimoyama, Int. J. of Robotics Res. (1984). [2] Raibert, Legged robots that balance. (1986). [3] Fukuoka, Kimura & Cohen, Int. J. of Robotics Res. (2003).
a biped robot: "Tetsuro" (currently, it has a trunk controlled by DC motor on the waist)
2009-2010 : "Step length adjustment using vision in 2D walking on the treadmill"
Movies
Publications