2009-2010年度
「
トレッドミル上
2次元歩行における視覚を用いた遊脚着地点の誘導」
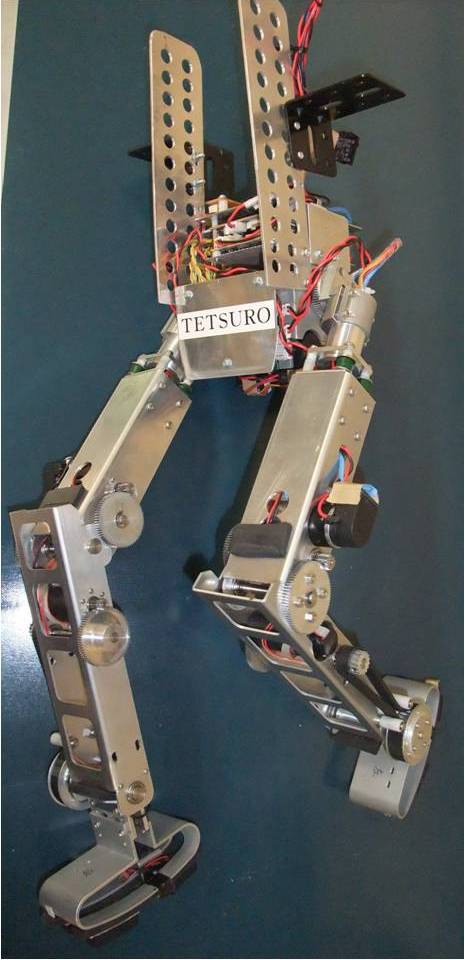
鉄郎(現在は上体:trunkを持つ)
一脚あたり3関節(腰、ひざ、足首)、腰部と上体間に1関節
すべての関節にDCサーボモタとエンコーダ
足底形状は楕円形
加速度センセとレイトジャイロを組み合わせて腰部の鉛直方向絶対角を計測
実験セットアップ (Under Construction)
二本の棒により腰部がピッチ平面内に拘束されている。だたし、摩擦は小さく、
制御が不適切なときは転倒する
。
トレッドミルの速度は可変(25cm/sec 〜 100cm/sec)。通常は33cm/secあたりで実験。
視覚にはIEEE1394カメラ「
DragonFly
」を使用。カメラはロボットに搭載されず、上部からロボット腰部のマーク・トレッドミル上のマーク(複数)を66msecごとに追跡し、鉄郎制御系にマーク位置情報を送る。
 鉄郎(現在は上体:trunkを持つ)
鉄郎(現在は上体:trunkを持つ)
鉄郎(現在は上体:trunkを持つ)
鉄郎(現在は上体:trunkを持つ)