羽ばたき飛翔ロボットの制御と誘導
比較的低速で飛翔する小型のロボットではレイノルズ数が小さい(10^2〜10^3)ので,大型の鳥のような滑空方式ではなく小型の鳥や昆虫のような羽ばたき方式が有効となる.ヘリコプタ方式も考えられるが,急発進・急停止・急旋回など羽ばたき方式の方が優れている点もある.
2011年度
- 羽ばたきロボットの翼特性による推進性能向上
- 小田 崇太,東 善之,木村 浩,トンボ型羽ばたきロボットの翼特性による推進性能の向上に関する研究, SI2011 講演会論文集, pp.485-488, 2011.12
2009-2010年度
- 羽ばたき周波数調節による胴体ピッチ角の安定化と飛翔高度の制御
- 羽ばたきロボットの自立化を図った。搭載バッテリ駆動で5分程度動作可能。
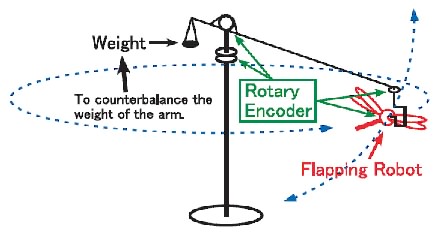
- 飛翔速度、高度、胴体ピッチ角・ヨー角を計測可能な装置(有線方式)を開発した。
- 羽ばたき周波数を変えることで、胴体ピッチ角や飛翔高度を目標値まわりで安定化させる制御を実現した。
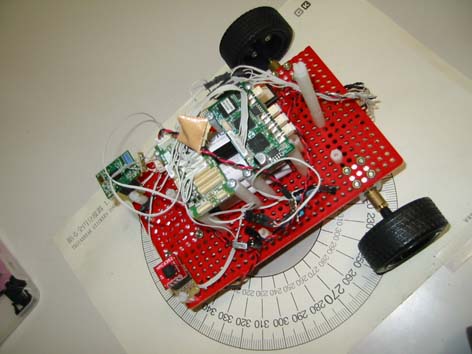
- 偏光コンパスを使用した車輪型ロボットの屋外自律誘導(ナビゲーション)
- ハチなどの昆虫は偏光コンパスを利用して巣とエサ場の間の誘導を行なっていることが知られている。偏光コンパスを自作し車輪型ロボットに搭載して、屋外での自律誘導の実験を行なった。偏光コンパスを用いた屋外自律誘導実験の結果を評価するために、車輪型ロボットには磁気方位センサ、GPSセンサを搭載している。将来は小型化を図り、羽ばたきロボットに搭載したい。
Movies
- 羽ばたきロボット・ケーブルなし・ピッチング制御あり (WMV: 3M,) [Jan. 2011]
- 羽ばたきロボット・ケーブルなし・ピッチング制御なし (WMV: 3M) [Jan. 2011]
- 羽ばたきロボット・計測装置つき・ピッチング制御あり (WMV: 4M)
[Oct. 2010]
- 羽ばたきロボット・計測装置つき・ピッチング制御なし (WMV: 3M) [Oct. 2010]
Publications
- Yoshiyuki Higashi, Hiroaki Tokuami and Hiroshi Kimura, Robot navigation using polarized light sensor without crossed-analyzer, Proc. of 6th Int. Symp. on Advanced Science and Technology in Experimental Mechanics (ISEM), No.110, 2011.11. (PDF)
- Yoshiyuki Higashi, Tatsuya Miyazaki and Hiroshi Kimura, Pitch Angle Control using Flapping Frequency for a Flapping-Wing Robot, Proc. of Int. Symp. on Adaptive Motion of Animals and Machines (AMAM), pp.75-76, Awaji, 2011.10 (PDF)
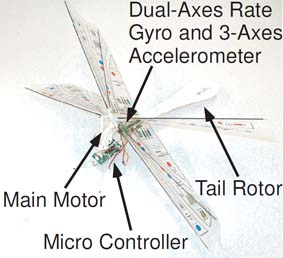
- 宮崎 達也,東 善之,木村 浩,レートジャイロと加速度センサを用いた羽ばたきロボットのピッチ角推定,第38回知能システムシンポジウム予稿集,pp.143-148, 2011.03
[PDF]
- 徳網 大哲,東 善之,木村 浩,偏光と地磁気を利用した羽ばたきロボットのためのナビゲーションシステム,第38回知能システムシンポジウム予稿集, pp.327-330, 2011.03
[PDF]
2008年度
市販の「メカトンボ」というラジコン玩具に小型計算機,角速度・加速度・光センサなどを搭載し,胴体ピッチ角の制御やLEDのトラッキング制御を行なった.
Movies
Publications
- 宮崎 達也,岡元 大哲,木村 浩,4枚翅を有する羽ばたきロボットの胴体ピッチング制御, SI2009 講演会論文集, pp.495-496, 2009.12