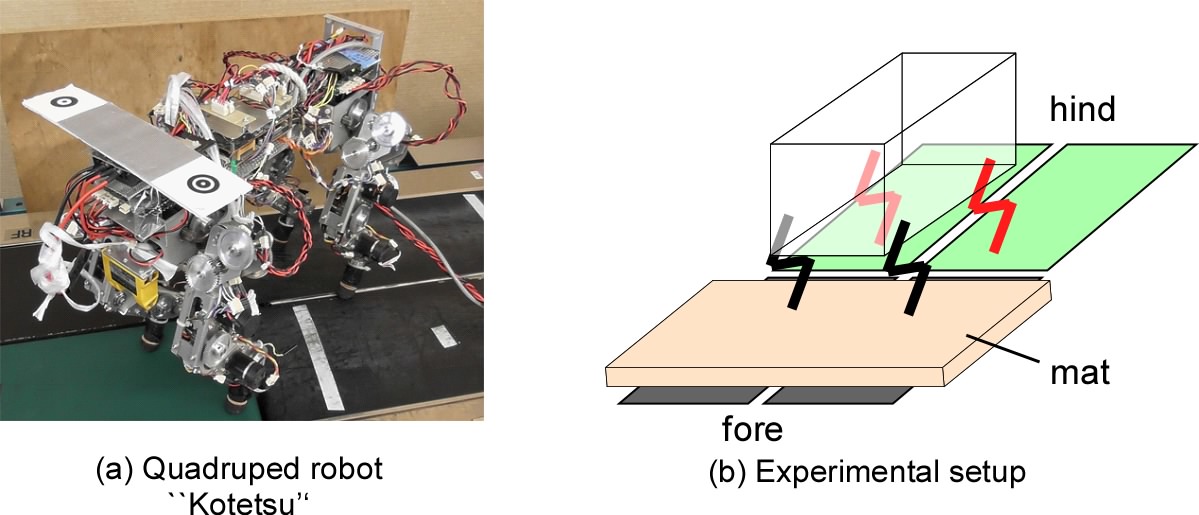
Fig. (a) A quadruped robot "Kotetsu" on the
split-belt treadmill. (b) Experimental setup of Kotetsu for split-belt
locomotion with hindlimbs.
Frigon et al.
(J. Phys. 2017) conducted hindlimb locomotion experiments using
spinal cats. In these experiments, the forelimbs of the spinal cat were
positioned on a fixed platform located 1 cm above the treadmill. We
followed these procedures using a quadruped robot, “Kotetsu.” The
forelimbs were stopped, and the hindlimbs were stepped on a treadmill
using PD control. We conducted two types of hindlimb locomotion
experiments, tied-belt locomotion (RH:LH = 13.2 [cm/s]:13.2 [cm/s], speed
ratio: 1), and split-belt locomotion, using speed ratios (fast belt
speed/slow belt speed) from 1.25 to 2.5 in Frigon’s experiments.