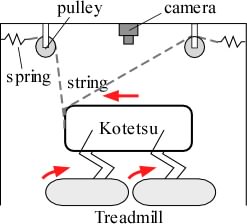
Experimental setup
In order to emulate
the head constraint in decerebrate cat experiments,
Kotetsu is tethered by two
strings with springs at the top of the body
in order to constrain
forward/backward motion and rotation in the horizontal plane.
But side-way
motion and rolling motion is not disturbed.
The camera above
equipped is for detecting the start of belt motion to make the robot
start to walk.
It also detects the change
from fixed to split-belt, but this is just for later data analysis
and is
not used for the robot control.