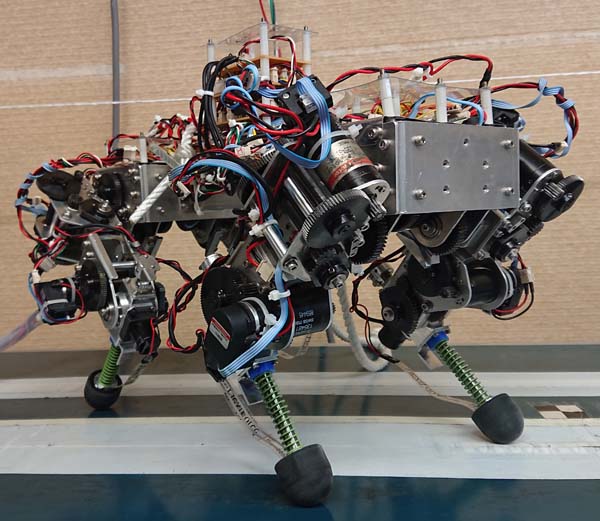
| Size | L: 40 x W: 25 x H: 22 cm |
| length | [thigh] 8.5 cm, [shank] 12 cm |
| weight | 6.5Kg (excluding batteries) |
| joints | (active) hip pitch, hip roll, knee pitch, and (passive) prismatic joint with spring at lower limbs |
| sensors | encoder, rate gyro (pitch&roll), accelerometer (pitch&roll&yaw), 1 axis force sensor |
| DC servo motors |
hip pitch, knee pitch, hip roll: MAXON RE25 20 [W] |
| gear reduction ratio |
hip pitch, knee pitch, hip roll: 97.6 |
| controller and etc. | CPU board: General Robotix HRP-3P-CN-A,
I/O board: General Robotix HRP-3P-MCN, OS: ART-Linux |
| velocity |
NOT YET (expectation max: ? m/s) |
| running style |
NOT YET |