The Quadruped Robot "Patrush-I"
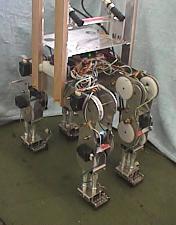 Patrush-I for Dynamic Walking (1999.9-2000.3)
Patrush-I for Dynamic Walking (1999.9-2000.3)
3 joints around a pitch axis for each leg. A photo encoder are
mounted on each joint. DC servo motors (23[W]) are mounted on 2 upper
joints. 6 axses force/torque sensor is attached on each leg.
Movie (2000 Jan.)
(Beautiful dynamic walking on terrain of medium degree of irregularity
by using CPG and reflexes via CPG based on somatic sensation, vestibular sensation.)
Movie (1999 Jul-Sep.)
(Walking up a step and over an obstacle based on vision.)
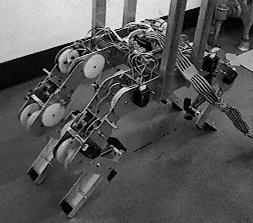
 Patrush-I for Dynamic Walking (1994-1999.8)
Patrush-I for Dynamic Walking (1994-1999.8)
3 joints around a pitch axis for each leg. A photo encoder are
mounted on each joint. DC servo motors (23[W]) are mounted on 2 upper
joints. Two micro switches were attached on each foot.
Movie (1998 - 1999 Mar.)
(Not so smooth walking on terrain of medium degree of irregularity
by using CPG and reflexes independent of CPG.)
Movie (1997 Feb.)
(Walking dynamically using neural oscillator networks and reflex mechanism)
 "Patrush-I" for Running
"Patrush-I" for Running
3 joints around a pitch axis for each leg. A photo encoder is
mounted on each joint. DC servo motors (23[W]) are mounted on hip and knee
joints. A spring is mounted on an ankle joint.
Movie (1998-Feb.)
(Running: Gait transition from standing to bounce via hopping)
Robot Specifications
- length 360mm
- height 330mm
- width 240mm
- weight 4.6kg
- controlled by two Transputers (1994-1999) or RT-Linx on PC(1999-2000)
 Research History and Abstract
(movies with explanations)
Research History and Abstract
(movies with explanations)
Publications