四足ロボット “パトラッシュ”
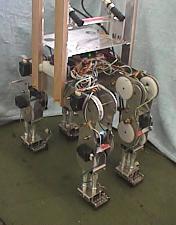 "Patrush-I" for Walking (1999.9-2000.3)
"Patrush-I" for Walking (1999.9-2000.3)
ピッチ軸回りの関節(2×4=8個)で構成される歩行(走行)実験ロボット。
各関節にDCサーボモータ(定格出力23W)及び光学式エンコーダを使用。
1999年9月以降は,各脚に6軸力センサを搭載.
ビデオ (1999)
 Patrush-I for Dynamic Walking (1994-1999.8)
Patrush-I for Dynamic Walking (1994-1999.8)
足底に二つのマイクロスイッチ
ビデオ (1997-Feb.)
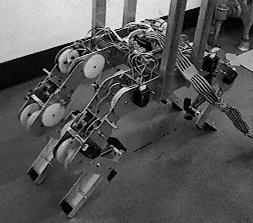 "Patrush-I" for Running
"Patrush-I" for Running
バネが足首関節に追加された. ビデオ (1998-Feb.)
- 全長360mm
- 全高330mm
- 全幅240mm
- 全重量4.6kg
研究の経過・概要 (説明付きビデオ多数)
既発表論文,予稿集原稿