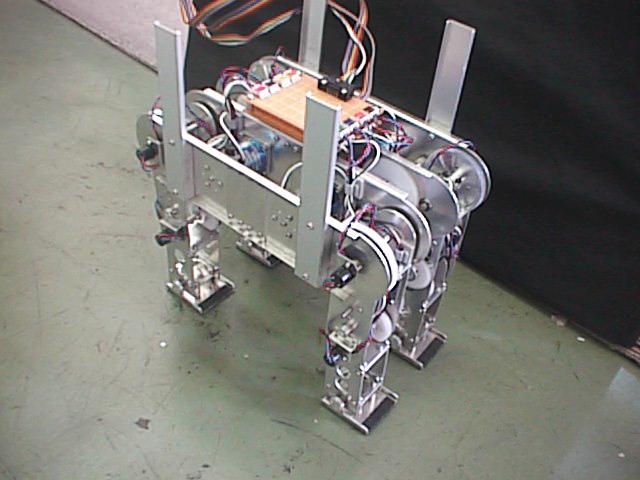
The Quadruped Robot "Patrush-II"
3 joints around a pitch axis for each leg. A photo encoder are
mounted on each joint. DC servo motors (18[W]) are mounted on 2 upper
joints. 1 axis force sensor will be attached on each leg.
Movie (2001 Jan.)
2D dynamic walking on flat terrain by using CPG and reflexes.
Experiment
Simulation
Robot Specifications
- length ??mm
- height 200-300mm
- width ??mm
- weight ??kg
- controlled by RT-Linux on PC
 Research History and Abstract
(movies with explanations)
Research History and Abstract
(movies with explanations)
Publications
 Patrush-II(2000.10-)
Patrush-II(2000.10-)