(Tekken2: self-contained for outdoor environment)
 Tekken1 for Dynamic Walking and Running (2000.10-)Tekken1 for Dynamic Walking and Running (2000.10-)
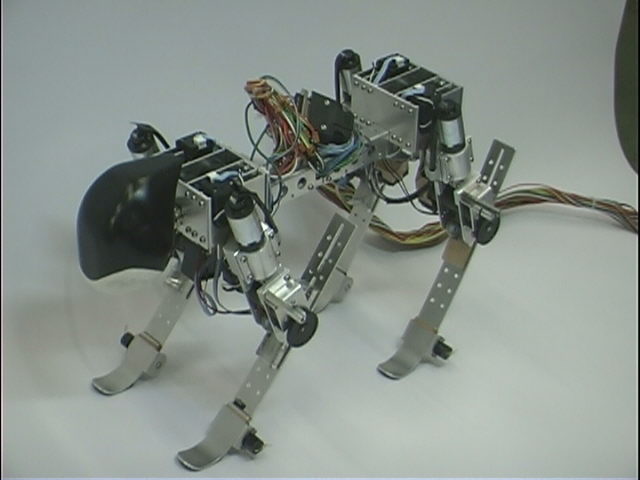
Tekken1 for Dynamic Walking and Running (2000.10-)Tekken1 for Dynamic Walking and Running (2000.10-)3 joints around pitch axis and 1 joint around yaw axis for each leg (DRAFT 1.3M). A photo encoder are mounted on each joint. DC servo motors, 23 [W] and 6[W] are mounted on 2 pitch joints and 1 yaw joint, respectively. Gear ratio of pitch hip joint, pitch knee joint and yaw hip joint is 15.6, 18.8 and 80, respectively. Rate-gyro sensors for 3 axes and 2 inclinometers for pitch and roll axes are mounted on the body. 1 axis contact sensor is attached on each leg.
Movie (2000 Oct. - Present)
Running using CPG and reflexes
Dynamic walking using CPG+responses, reflexes and vision
Dynamic walking using CPG+responses and reflexes
Robot Specifications
{kind=link}