四脚ロボット「鉄犬1」
不整地歩行・走行への挑戦
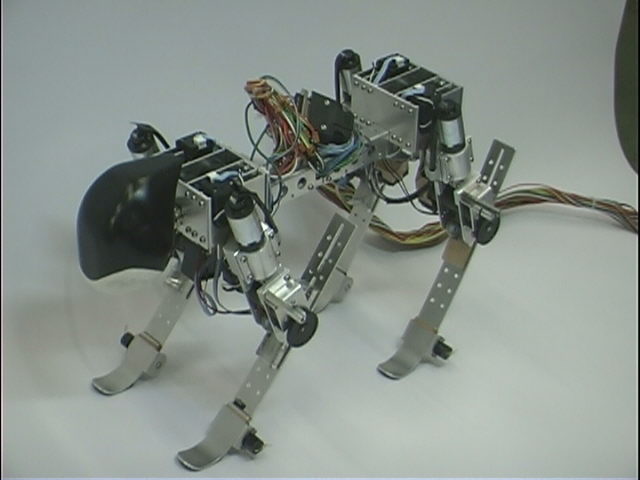
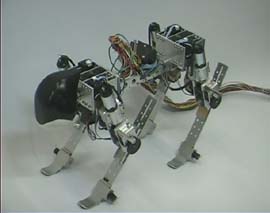 不整地自律適応ロボットの三次元版「鉄犬1」(2000.10 - ):東京精機製作
不整地自律適応ロボットの三次元版「鉄犬1」(2000.10 - ):東京精機製作
Movie (2000 Oct. - Present)
スペック
- weight : 3.1 kg including power batteries
- size : [H] 21 cm, [L] 40 cm (body : 23 cm), [W] 18 cm (body : 12 cm)
- joints : 3 (hip, knee and ankle) joints around pitch axis and 1 (hip) joint around yaw axis for each leg
- actuators : DC servo motors of 23 W on 2 pitch joints (pitch hip and pitch knee) and of 5 W on yaw hip joint
- gear ratio : 16, 19 and 84 for pitch hip joint, pitch knee joint and yaw hip joint, respectively
- sensors : a photo encoder on each joint, 2 rate-gyro sensors and 2 inclinometers for pitch and roll axes on the body, and a contact sensor on the tip of each leg
- power source : DC power regulator (outside)
- controller : RT-Linux on a desktop PC and RIF-IO boards
- operation : manual operation using a keyboard
特徴
- 足首はバネ&ロック機構の付いた受動関節
- 旋回も可能
- 視覚適応の研究も実施中
 不整地自律適応ロボットの三次元版「鉄犬1」(2000.10 - ):東京精機製作
不整地自律適応ロボットの三次元版「鉄犬1」(2000.10 - ):東京精機製作