Rover with Active Camera
Pan and tilt axses of camera base are actively controlled by using rate-gyro. sensor and vision.
Publications
J. Ding, H. Kondou, H. Kimura, Y. Hada and K. Takase, "Robust object tracking of irregular terrain vehicle", Proc. of IEEE/RSJ IROS2002, Lausanne, pp.147-152, 2002.10 (PDF[1.8M])
Movie (2000 Jan.)
The rover is going over natural irregular terrain with the camera base
actively controller for visual tracking.
Robot Specifications
 Rover(1999.9-)
Rover(1999.9-)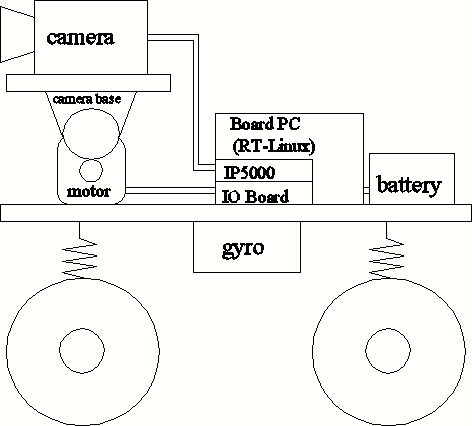{kind=link}