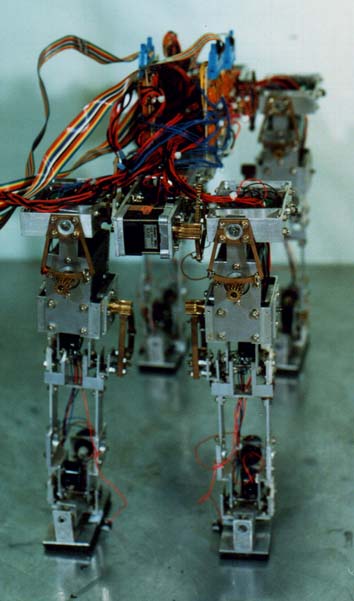
The Quadruped Robot "Collie1" for Dynamic Walking
-
-
3 joints around a pitch axis and 2 joints aroud a roll axis for each
leg. A potentiometer is mounted on each joint. DC servo motors are
mounted on 2 joints around a pitch axis and 1 joint aroud a roll axis.
-
- length 420mm
- height 320mm
- width 240mm
- weight 5kg
- controlled by MC68010 using Real Time OS (RMS68K)
-