上体を持つ2次元2足ロボットの視覚を用いた遊脚着地点制御
人はリミットサイクル型歩行を行いながら視覚に誘導されて遊脚着地点を選択することができる。現在、鉄郎に視覚情報を転送し、床面のマークを認識しリミットサイクル型歩行を維持しながらマーク位置に遊脚を着地させる制御手法の研究を行なっている。
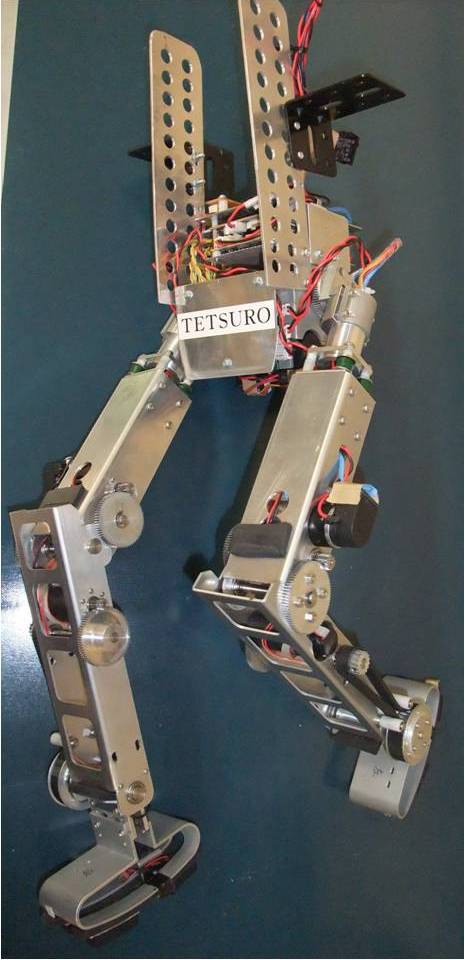 鉄郎(鉄郎の写真と実験セットアップ)
鉄郎(鉄郎の写真と実験セットアップ)
2009-2011年度「トレッドミル上2次元歩行における視覚を用いた歩幅制御」
Movies
- 視覚情報を用いたトレッドミル上での仮想溝越え(ベルト上に流れてくる二つのマークの間を溝とみなして、溝を踏み越える)
(実験のムービ WMV 2.7M) [Feb. 2011] 成功率50%程度
- 視覚情報を用いたトレッドミル上での腰部位置制御 (上方カメラ座標で、中心位置保持 -> 後方に12cm移動 -> 前方に12cm移動) (鉄郎の歩行ムービ, WMV: 10M) (上方カメラ映像:腰部マークの追跡, WMV: 6M) [Jan. 2011]
Publications
- 浅田 亮,長谷 善生,東 善之,木村 浩,リミットサイクル型2次元2足歩行ロボットの視覚を用いた遊脚運動制御,SI2011 講演会論文集, pp.489-492, 2011.12
- 長谷 善生,東 善之,木村 浩,2次元2足ロボットのリミットサイクル型歩行における視覚を用いた遊脚着地点調節,第38回知能システムシンポジウム予稿集, pp.335-340, 2011.03 (PDF)
- 長谷 善生,東 善之,木村 浩,足首トルク制御を用いたリミットサイクル型2足歩行ロボットの歩幅制御,SI2010 講演会論文集,, 2010.12