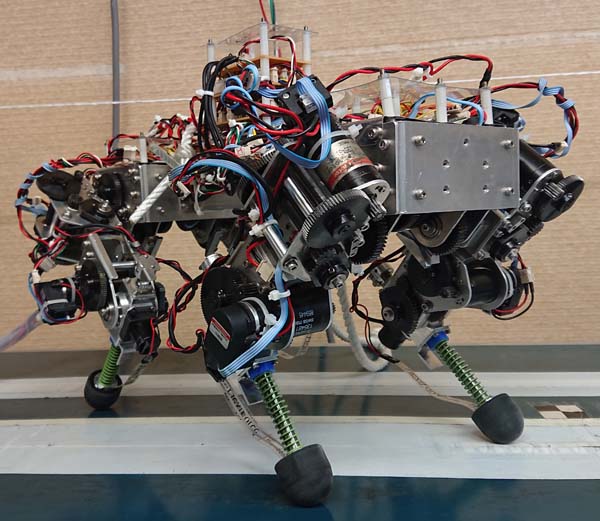
| 大きさ | L: 40 x W: 25 x H: 22 cm |
| 長さ | [thigh] 8.5 cm, [shank] 12 cm |
| 脚間距離 | 前後:? cm,左右: ? cm |
| 重量 | 6.5Kg (電源は外部) |
| 関節 | (アクティブ)ピッチ腰,ロール腰,ピッチ膝,(パッシブ)下肢直動バネ関節 |
| 搭載センサ |
エンコーダ,レイトジャイロ(ピッチ,ロール),加速度計(ピッチ,ロール,ヨー),1軸力センサ |
| DCサーボモータ |
ピッチ腰,ピッチ膝,ロール腰: MAXON RE25 20 [W] |
| 減速比 | ピッチ腰,ピッチ膝,ロール腰:97.6 |
| コントローラ,その他 |
CPUボード:General Robotix社製HRP-3P-CN-A,I/O ボード: General Robotix社製HRP-3P-MCN,OS:ART- Linux |
| 走行速度 |
NOT YET (期待値: 最大 ?m/s) |
| 走行形態 | NOT YET |