English version is here.
不整地自立・自律走行ロボット
Pan and tilt axses of camera base are actively controlled
by using rate-gyro. sensor and vision.
Publications
- J. Ding, H. Kondou, H. Kimura, Y. Hada and K. Takase, "Robust
object tracking of irregular terrain vehicle", Proc. of
IEEE&RSJ IROS2002, Lausanne, pp.147-152, 2002.10 (PDF[1.8M])
- 近藤 浩史,木村 浩,高瀬 國克:"不整地移動車のためのカメラ姿勢制御", 第17回日本ロボット学会学術講演会予稿集,
pp.493-494,1999
- 近藤 浩史,木村 浩,高瀬 國克:"不整地移動車のためのカメラ姿勢制御", ロボティクス・メカトロニクス講演会2000講演論文集,
2000
- 近藤 浩史,木村 浩,高瀬 國克:"不整地移動車のためのカメラ姿勢制御", 電気学会研究会資料SC-00-1〜10,
pp.29-32, 2000
Movie (2002 Jun.)
The rover is going over natural irregular terrain with the camera
base actively controller for visual tracking.
Robot Specifications
 Rover(1999.9-)
Rover(1999.9-)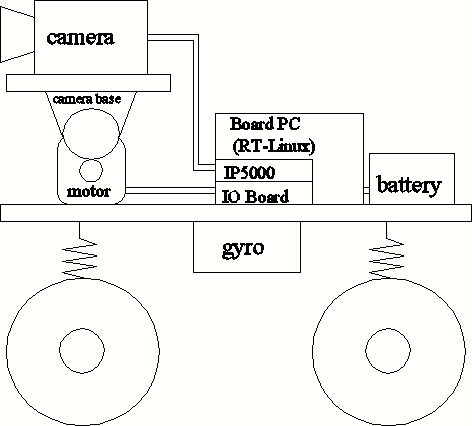{kind=link}