 KITARO (写真と実験セトアップ)
KITARO (写真と実験セトアップ)
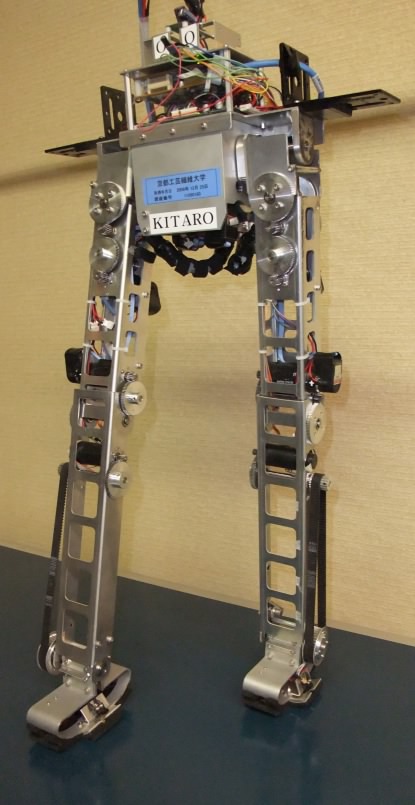
人と同様に「リミットサイクルを構成する制御手法」でエネルギ効率に優れた3次元二足歩行を実現するために「KITARO」という名前のロボットを開発した.将来的には鉄犬のような不整地自律適応を二足ロボットで実現したいと考えている.
KITARO (写真と実験セトアップ)
2009-2010年度(under construction. ...)
ピッチ面内2次元歩行:絶対角を用いた踏み出し反射(遊脚着地角制御)の導入と不整地適応
ピッチ面内とロール面内の踏み出し反射の導入と3次元歩行の実現(not yet)
2008年度(under construction. ...)
KITAROの設計・製作.計算機やセンサの搭載
踏み出し反射(遊脚着地角制御)の導入とトレッドミル上2次元歩行の実現
Movies
Publications