四脚ロボットの適応的不整地動歩行
研究の経過・概要 with Movies
「環境を外乱とみなすのではなく,環境と身体との間の相互作用によって創発的に生み出される運動が歩行・走行である」との定義の元に,不整地上で非常に柔軟 かつロバストな動物の歩行に関する生物学や神経生理学分野での知見を参考にして,4脚ロボットの機構と制御手法を新たに開発した.
歩行運動を生成するシステムはそれぞれ独自の非線形ダイナミクスを持つ「機械システム」と「神経システム」から成り,これら二つの系がカップリングされて構 成される動的システムは環境との相互作用を通して適応的な運動を創発的に生成する.カップリングされた力学系は常に自身のダイナミクスに従い,変化する環境に 自律的に対応可能であり,また,神経系の内部パラメータを操作することにより別の状態に移行することが可能である.従って,ロボット自身や環境のモデル化,自 律的な運動計画,計画された運動と実際の運動との矛盾といった従来のロボティクスにおける困難な問題を避けることが可能である.
ビデオ
ビデオ
ビデオ
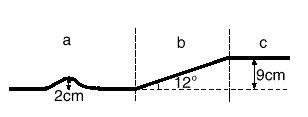
ビデオ (12°の坂の登り降り,うねりのある不整地)
ビデオ (凸がある平面から12°の登り坂)
ビデオ
ビデオ
ビデオ
{kind=link}