- 1999
CVL New Robot
- 1998
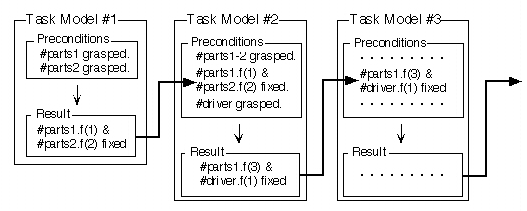
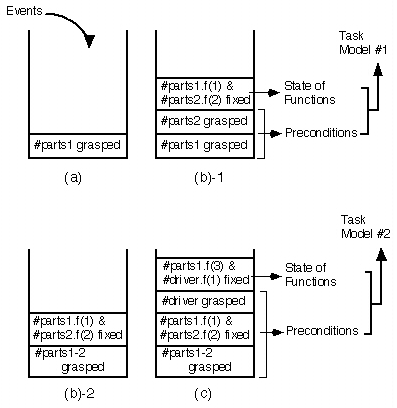
[Abstract] In this study, we constructed the framework for the vision-based cooperation of the human and a robot hand taking toy parts assembly as an example. The task models for cooperation were generated by observation of the human demonstration. The operations of the robot assistance were generated based on the task models. We proposed the mechanism by which the robot was able to select the appropriate assistance motion according to the human motion at each stage. It must be noticed that several patterns of cooperation appear even for only one series of two task models when we consider passing an object from the robot to the human. As the future works, when several series of task models are applicable to the current scene and the human motions, the mechanism for selecting an appropriate one is needed. For more flexible cooperation, estimation of human states and error recovery based on it are significant. For the general mechanical assembly, more general definition% for functions and states is needed. In addition, the operation control mechanisms using force sensors and skills are needed.[Photos of cooperation experiments based on a series of task models]
-
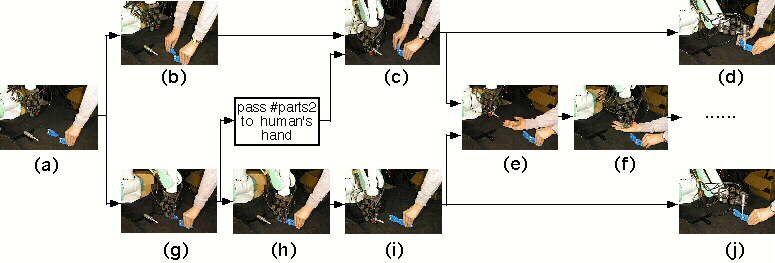
Six patterns of cooperation were
executed according to the human motions.
- Those were (Movies)

(a) -> (b) -> (c) -> (d),(945Kbytes)
(a) -> (b) -> (c) -> (e) -> (f),(492Kbytes)
(a) -> (g) -> (c) -> (d),(1,163Kbytes)
(a) -> (g) -> (c) -> (e) -> (f),(739Kbytes)
(a) -> (g) -> (h) -> (i) -> (e) -> (f),
(a) -> (g) -> (h) -> (i) -> (j).(1,199Kbytes)
- The meaning of each scene was as follows:
(a) The human hand grasped #parts1.
(b) The human hand grasped #parts2.
(c) The robot hand grasped #driver. The human hand fixed #parts2.f(2) to #parts1.f(1).
(d) The robot hand fixed #driver to #parts1.f(3).
(e) The human hand requested #driver by hand motion.
(f) The robot hand passed #driver to the human hand.
(g) The robot hand grasped #parts2.
(h) The robot hand fixed #parts2.f(2) to #parts1.f(1).
(i) The robot hand grasped #driver.
(j) The robot hand fixed #driver to #parts1.f(3).
A series of task models was generated by analysis of the human demonstration (movie:993Kbytes) using a event-stack mechanism.
-
Six patterns of cooperation were
executed according to the human motions.
- 1996
In order to assist the human, a robot must autonomously recognize the human's motions in real time. The vision is the most useful sensor for this purpose. The robot recognizes the current target objects and the grasp configuration of the human by vision, and must plan and execute the needed assistant motion based on the task purpose and the context. In this research, we tried to solve the above problems. We defined the abstract Task-Model, analyzed the human demonstration by using Event and State Buffer, and automatically generated the Task-Models (Task-Knowledge) needed in the assistance by the robot. The robot planned and executed the assistant motions based on the Task-Knowledge in the cooperation with the human by analyzing the human motions. We implemented the 3D object recognition system by using the appearance based and minute templates based matching and the sub-pixel stereo vision. The effectiveness of these methods was tested through an experiment in which the human and the robotic hand assembled toy parts in cooperation.Video
- A robot recognized toy parts grasped by human using vision, grasped a appropriate part for assembly and moved it to the appropriate position.
- A robot recognized toy parts grasped by human using vision, grasped a driver tool for assembly and moved it to the screw hole position.
{kind=link}
{kind=link}
{kind=link}