Photo & Movies
Motion Recognition Based Cooperation between Human and Robot Using Vision
This research has been studied on under supervision of
Prof. Ikeuchi at his Lab in Univ. Tokyo.
[1999-]
-
Ikeuchi's Lab.
constructed
a new humanoid-type robot.
The following demo was performed at Kyoto Univ. for CDV99 on Nov. 20 1999.
[1998]
-
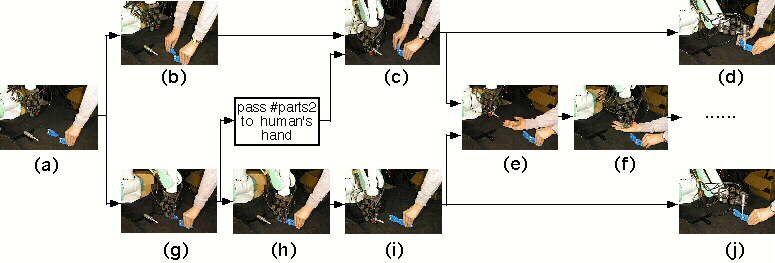
Photos of cooperation experiments based on a series
of task models. Six patterns of cooperation were
executed according to the human motions.
- Those were (Movies)
(a) -> (b) -> (c) -> (d),(945Kbytes)
(a) -> (b) -> (c) -> (e) -> (f),(492Kbytes)
(a) -> (g) -> (c) -> (d),(1,163Kbytes)
(a) -> (g) -> (c) -> (e) -> (f),(739Kbytes)
(a) -> (g) -> (h) -> (i) -> (e) -> (f),
(a) -> (g) -> (h) -> (i) -> (j).(1,199Kbytes)
- The meaning of each scene was as follows:
(a) The human hand grasped #parts1.
(b) The human hand grasped #parts2.
(c) The robot hand grasped #driver.
The human hand fixed #parts2.f(2) to #parts1.f(1).
(d) The robot hand fixed #driver to #parts1.f(3).
(e) The human hand requested #driver by hand motion.
(f) The robot hand passed #driver to the human hand.
(g) The robot hand grasped #parts2.
(h) The robot hand fixed #parts2.f(2) to #parts1.f(1).
(i) The robot hand grasped #driver.
(j) The robot hand fixed #driver to #parts1.f(3).
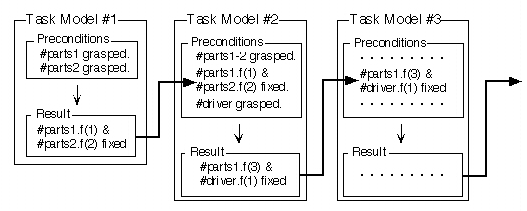
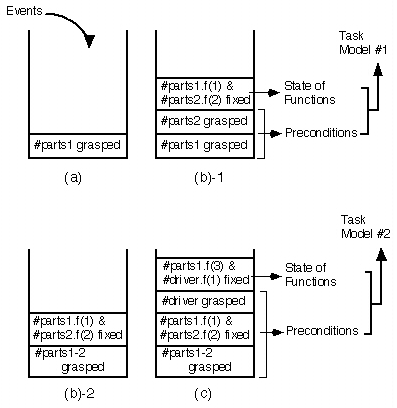
A series of task models was
generated by analysis of
the human demonstration (movie:993Kbytes)
using a event-stack mechanism.
Hardware & Software System.
 [1996]
[1996]
History and Abstract
Publications
{kind=link}
{kind=link}
{kind=link}