Running Gait Generation of a Quadruped Robot with Passive Knee Joints
 Rush (2003-2009)
Rush (2003-2009)
History and Abstract with Movies
2006-2009
Simulation and realization of running of a quadruped in a full-bound gait, which involves the extented flight phase and the gathered flight phase in one cycle.
Publications
- Toshiki Masuda, Hiroshi Kimura and Kunikatsu Takase, Emergence of a Quadrupedal Bound Gait as Interaction among the Brain, Body and Environment Proc. of SICE Annual Conference 2008, Tokyo, pp.2501-2506, 2008.08
2003-2006
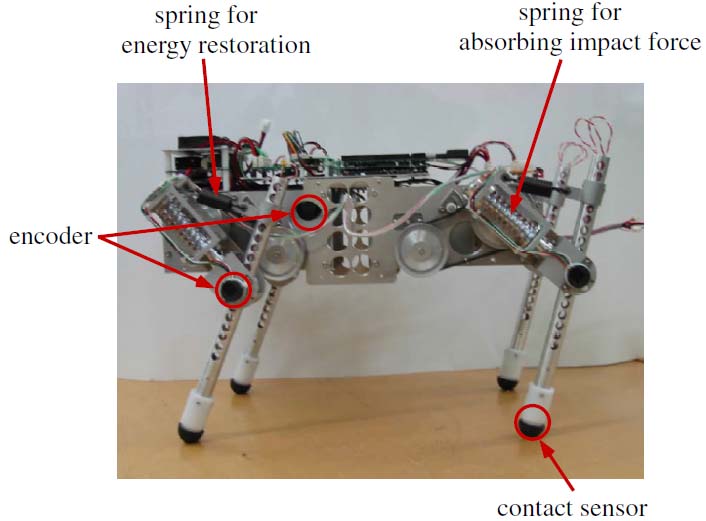
We tried to make a quadruped robot walk dynamically and run on irregular terrain by using a biologically inspired method. Towards running on irregular terrain, we carried out simulations and experiments of a 2D quadruped robot called Rush. We used Delayed Feedback Control to generate a stable and efficient bounding gait. We made a 2D running quadruped Rush with passive knee joints attached springs.
Movies of experiments
Movies of simulations
- Autonomous transition from steady standing to bound gait running (slow motion)
- Running over a step 2 cm in height (slow motion)
Publications
- Zu Guang Zhang and Hiroshi Kimura, "Rush: a simple and autonomous quadruped running robot", Journal of Systems and Control Engineering, Vol.223, Part I, pp.323-336, 2009 (PDF)
- Zu Guang Zhang, Hiroshi Kimura and Yasuhiro Fukukoka, "Self-Stabilizing Dynamics for a Quadruped Robot and Extension Towards Running on Rough Terrain", Journal of Robotics and Mechatronics, Vol.19, No.1, pp.3-12, 2007.2 (Abstract on line)
- Zu Guang Zhang, Hiroshi Kimura and Kunikatsu Takase, "Adaptive Running of a Quadruped Robot Using Forced Vibration and Synchronization", Journal of Vibration and Control, Vol.12, No.12, 1361-1383, 2006.12. (Abstract on line, PDF)
- Zu Guang Zhang, Hiroshi Kimura and Yasuhiro Fukukoka, "Autonomously Generating Efficient Running of a Quadruped Robot Using Delayed Feedback Control", ADVANCED ROBOTICS, Vol.20, No.6, pp.607-629, 2006.6 (PDF)
Running of Tekken1
Running of Patrush1