Adaptive Dynamic Walking of Quadruped
Robots on Irregular Terrain
History and Abstract with Movies
We tried to make a quadruped robot walk dynamically and run on irregular
terrain by using a biologically inspired method. The findings obtained
through experiments using the quadruped called Patrush-I
, Patrush-II, Tekken-I
& Tekken-II suggested a
simple method for producing autonomous adaptive dynamic walking on terrain
of high degree irregularity.
In the neural system model proposed in this study, the relationships
among CPGs (Central Pattern Generators), sensory input, reflexes and the
mechanical system are simply defined, and motion
generation and adaptation are emergently induced by the coupled dynamics
of a neural system and a mechanical system by interacting with the
environment.
We are colaborating with Prof. Avis
H. Cohen (Maryland Univ.).
- 2006-
Navigation of Tekken-III & IV using a
laser range sensor (following a human: MPEG
5M)
- 2004(Jun.)-2005
We made self-contained Tekken-III & IV
for the prototype robot exhibition at Aichi Expo on Jun. 2005 while
being supported by NEDO.
Results of experiments
- Tekken-IV Aichi Expo: (in aritifical garde, 0.6 m/s, 2min.43sec. :
MPEG
14M)
- 2003(Mar.)- 2004(Jun.)
We made Tekken-II be self-contained for
experiments in the outdoor environment. In order to reduce the energy
consumption, we designed a new quadruped robot "Tekken-II", which has
the spring mechanism around the hip knee joint. Almost same control
method with the one of Tekken-I is used.
Results of experiments
- outdoor experiment: (on natural ground, 0.5 m/s, 55 sec. : MPEG
15M)
- outdoor experiment: (in Univ. campus, 0.5 m/s, 60 sec. : MPEG
12M)
- 2000(Oct.)-2003(Jun.)
We designed a new quadruped robot "Tekken-I"
which can move in 3D (the pitch, roll and yaw planes). To generate
appropriate adaptation, it is necessary to design both the neural system
and the mechanical system carefully. In this study, we designed the
neural system consisting of CPGs, responses, the stretch reflex and
other reflexes referring to biological concepts. We also designed the
passive spring-and-lock mechanism at the ankle joint as mechanical
implementation of the flexor reflex. The virtual spring-damper system
became effective since Tekken had a light-weighted leg and high
backdrivability in each joint. The physical oscillations such as the
motion of the virtual spring-damper system of each leg and the rolling
motion of the body are mutually entrained with CPGs as the neural
oscillations. A CPG receives sensory input and changes the period of its
own active phase as responses. The virtual spring-damper system also
receives sensory input and outputs torque as reflexes. The states in the
virtual spring-damper system are switched based on the phase signal of
the CPG. Consequently, the adaptive walking is generated through the
interaction with environment.
Results of experiments
- 1999 (Oct.)-2000(Jan.)
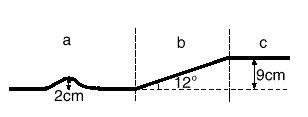
We integrated several reflexes such as stretch reflex, vestibulospinal
reflex, and extensor and flexor reflex into CPG. We tried to realize
adaptive walking up and down a slope of 12 degrees, walking over an
obstacle 3 cm in height, and walking on terrain undulation consisting of
bumps 3 cm in height with fixed parameters of CPG and reflexes. The
success in walking on terrain of medium degree of irregularity with
fixed parameters of CPG and reflexes in spite of stumbling and landing
on obstacles shows that the biologically inspired control proposed in
this study has an ability for autonomous adaptation to unknown irregular
terrain.
Results of experiments
- walking up and down a slope and over a step 3cm in height (MPEG
1.4M)
- walking over terrain undulation with long pitch (MPEG
1.3M)
- walking over terrain undulation with short pitch (MPEG
1.3M)
- 1998-1999 (Oct.)
In order to realize walking on irregular terrain, we proposed the
biologically-inspired control method consisting of four levels, those
are, ``adaptive control using a muscle stiffness model'', ``adaptive
control based on vestibular sensation'', ``parameters adjustment based
on somatic sensation and reflexes coordination based on vestibular
sensation'', and ''motion adjustment based on visual information''.
Results of experiments
- By using a muscle stiffness model alone, a robot succeeded in
walking up a bump and a slope of 7 degrees, but failed
in walking up a slope of 12 degrees. (Movie:MPEG
415K)
- By using both muscle stiffness model and vestibulospinal reflex, a
robot succeeded in walking up a slope of 12 degrees. But, it
was not a smooth walking because of occasional slipping and
stamping with no progress. (Movie with sound:MPEG
2M)
- By introducing a cerebellum model for adjusting CPG's parameters
based on somatic sensation, walking up a slope became much smooth
with less slipping and no stamping because entrainment between a CPG
and a musculo-skeletal system had been accomplished.
Moreover, by introducing a cerebellum model for coordination of
reflexes based on vestibule sensation, a robot succeeded in walking
adaptively and much smoothly on irregular terrain shown in the
figure.
Movie (with
sound:MPEG 1.8M)
- By introducing a cerebellum model for adjustment of "gamma motor
neuron activity" controlling sensitivity of "muscle spindle", a
robot succeeded in walking up and down a long slope of 12 degree
inclination. (Movie:MPEG 721K)
- When walking up a step 3cm in height, a robot stumbled(MPEG
387K) or stopped(MPEG 500K)
without adjustment of external input to CPG.
But, a robot succeeded (with
sound:MPEG 1.3M) with adjustment of the external
input to CPG based on stereo-vision.
- 1997
For running on flat terrain, we combined a spring mechanism and a neural
oscillator network. It was shown that the matching of two oscillations
by springs and a neural oscillator network was important in hopping. It
was also shown that entrainment between neural oscillators caused the
transition of the running gait from hopping to bounce. It must be
noticed that the transition of the running gait was realized by
modification of a few parameters of a neural oscillator network. This
made the realization of running in a bounce gait easy.
Results of experiments
(Running: Gait transition from standing to bounce via hopping)
- 1996
For dynamic walking on irregular terrain, we implemented the control
system using a neural oscillator network, stretch reflex and flexor
reflex. The stable dynamic walking under the obstruction to a swinging
leg was realized by flexor reflex and crossed stretch reflex. The
walking up a step was also realized by modification of the single
driving input to a neural oscillator network. It must be noticed that
the flexible and robust dynamic walk on irregular terrain was realized
by modification of a few parameters of a neural oscillator network. This
fact obtained through experiments using the quadruped called Patrush-I
showed the potential ability of a neural oscillator network for
adaptation in dynamic walking on irregular terrain.
Results of experiments
(Walking dynamically using neural oscillator networks and reflex
mechanism)
- 1994
Waling on flat terrain in a trot and pace gait of a quadruped robot was
realized by using a neural oscillator network. But sometimes walking
became unstable even on flat terrain because the supporting legs
slipped. This meant that it was difficult to realize a stable walking
only using a neural oscillator.
Results of experiments
(Walking dynamically in a trot and a pace gait: Supporting legs
slipped!!!)
Photo&Movie of "Patrush" & "Tekken"
Publications
{kind=link}