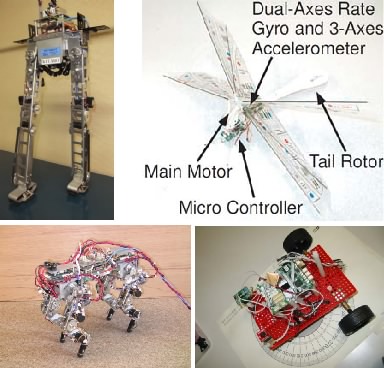
(左上):三次元二足ロボット,(右上):自立型羽ばたきロボット
(左下):三次元四足ロボット、(右下):偏光センサ誘導車輪型ロボット
生物規範型ロコモーション・ロボットの研究について
このことをバイオメカニクス的に考察してみると、機械工学でよく知られた無次元数であるフルード数(遠心力/重力)や無次元速度(sqrt(フルード数)),レイノルズ数(慣性力/粘性力)が役に立ちます。脚式移動については、人・ネコ・ゴキブリなど脚数や大きさが異なっても、無次元速度が約0.7くらいで歩行から走行に移行することが知られています。さらに、走行時の床反力を計測すると人・ネコ・ゴキブリで非常によく似たパターンが見られます。また、鳥や昆虫の飛翔方式については、レイノルズ数の値:10^4(10の4乗)を境にして、それよりも大きいときは滑空(羽ばたきにより推力を得て気流中にある翼により揚力を得る)が主で、小さいときは羽ばたき(羽ばたきにより推力と揚力の両方を得る)が主となります。
これらの事実は、大きさや生物種の違いを超えて脚式移動や飛翔といったロコモーションには共通の原理が存在することを示しています。そして、「アクチュエータや関節数の違いにも拘らずロボットのロコモーションにおいても同様な原理が有効ではないか」という仮説が生物規範型ロコモーション・ロボット研究の背景にあります。我々は機構設計やロコモーション運動のパターン生成・制御手法について、生物で得られた知見をロボットに適用して、これまでに実現できなかった適応的なロコモーションを実現することを目指しています。
研究室のロボットの写真(下図)やムービーはこのWEBページで公開さています。お時間があるときに見て楽しんで頂ければと思います。
(左上):三次元二足ロボット,(右上):自立型羽ばたきロボット
(左下):三次元四足ロボット、(右下):偏光センサ誘導車輪型ロボット
[謝辞]
鉄犬シリーズ,KITARO,小鉄,羽ばたきロボット計測装置の詳細設計と製作を(株)東京精機[現在、(株)東京精密機械研究所]に依頼しました.いつもありがとうございます.